Robotertechnik Zu Besuch bei einem besonderen Gastwissenschaftler
Keine Beine, nur ein Arm und ein ziemlich flaches Gesicht: Im Gebäude ID ist ein außergewöhnlicher neuer Mitarbeiter eingezogen.
An seiner Bürotür steht nur „Gastwissenschaftler“. Die Einrichtung ist ebenso schlicht wie das Schild an der Tür: Sie besteht lediglich aus einem überdimensionierten Vier-gewinnt-Spiel, in dem rote und gelbe Scheiben wild durcheinander gemischt sind. Sawyer ist seit Oktober 2016 an der RUB. Als wir den Raum betreten, hat er die Augen geschlossen. Ruhemodus. Mit einem Knopfdruck erwacht er jedoch zum Leben und lässt seinen langen rot-schwarzen Arm ein paar kunstvolle Bewegungen ausführen.
„Eigentlich ist Sawyer ein Industrieroboter“, erklärt Prof. Dr. Diana Göhringer, Leiterin der Arbeitsgruppe für anwendungsspezifische Multi-Core-Architekturen. Er kann verschiedene Tätigkeiten lernen, zum Beispiel Pakete nach Größe sortieren. Neue Fähigkeiten eignet er sich an, indem ein Mensch seinen Arm bewegt und ihm so vormacht, wie er etwas zu tun hat. Der Roboter speichert den Ablauf und kann ihn anschließend erneut ausführen.
Effizienter mit Programmierung
„Dabei lernt Sawyer aber vielleicht nicht die beste Art und Weise, eine bestimmte Sache zu tun“, sagt Göhringer. Effizienter könnte es sein, ihn für bestimmte Tätigkeiten zu programmieren. Genau das wird Göhringers Gruppe in den kommenden Monaten angehen, gemeinsam mit dem Team um Prof. Dr. Michael Hübner vom Lehrstuhl für eingebettete Systeme.
Der sogenannte Gastwissenschaftler wird also eine Reihe neuer Dinge lernen. Unter anderem, wie man „Vier gewinnt“ spielt. Das ist aber nur der erste Schritt, um ihm komplexere Bewegungsabläufe und Interaktionen mit Menschen und anderen Maschinen beizubringen.
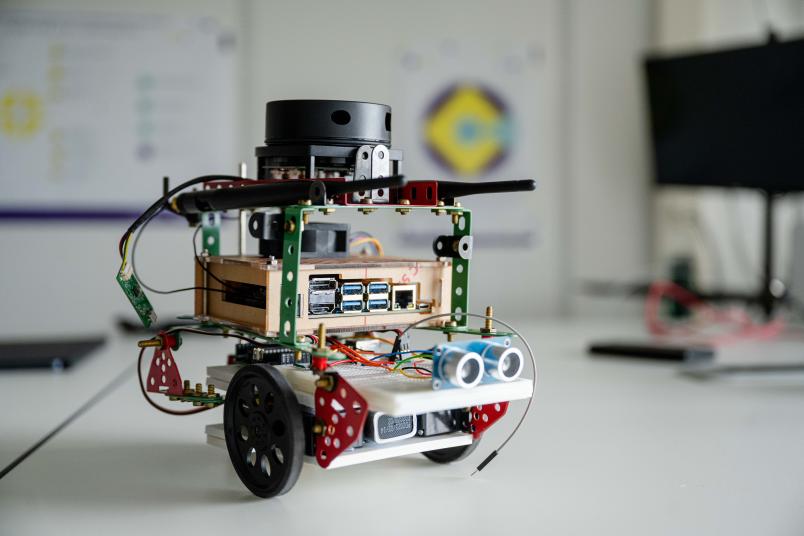
Im Gebäude ID ist Sawyer wahrlich nicht der einzige Roboter. Für ein anderes Forschungsprojekt sind zum Beispiel Turtlebots im Einsatz, kniehohe kompakte Roboter ohne bewegliche Extremitäten. Beide verwenden das gleiche Betriebssystem: ROS, kurz für Robot Operating System. Die RUB-Ingenieure wollen testen, inwieweit sie Turtlebots und Sawyer miteinander kommunizieren lassen können.
Mensch-Maschine-Interaktion
Besonders interessiert Diana Göhringer und Michael Hübner aber auch die Interaktion zwischen Mensch und Maschine. Aufgrund von Sicherheitsbedenken ist diese in der Industrie derzeit nur bedingt möglich. Praktisch wäre es, wenn Menschen und Roboter Seite an Seite arbeiten könnten, jeder das macht, was er am besten kann, und beide Spezies auch miteinander interagieren würden.
Roboter könnten den Menschen etwa helfen, indem sie schwere Bauteile anreichen. Optimalerweise würden sie erkennen, wie groß ein Mensch ist, und ihre Armhöhe daran anpassen. Das erfordert nicht nur eine geschickte Programmierung, sondern auch eine komplexe Bildverarbeitung, um das menschliche Gegenüber richtig zu erfassen. Auch daran arbeiten die Bochumer Forscher.

Los geht es aber erst mal mit „Vier gewinnt“. Warum eigentlich? „Einfach nur, weil die Doktoranden es sich gewünscht haben“, erzählt Diana Göhringer. „Man hätte alle möglichen Tätigkeiten wählen können.“ Für das Spiel muss der Roboter greifen und Spielsteine präzise ablegen; außerdem muss er Bilder verarbeiten, um mit einem Menschen zu interagieren. Also genau das, was auch im industriellen Kontext relevant ist.