Medienwissenschaft
Die Welt, wie ein Roboter sie sieht
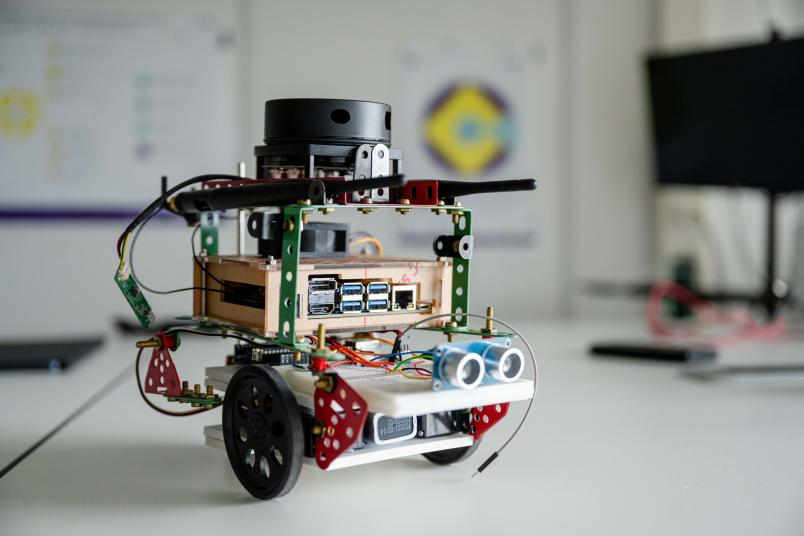
Um zu verstehen, wie die Welt in einen Roboter kommt, machten sich Forschende der Medienwissenschaft daran, einen Roboter von Grund auf zu konstruieren.
Wie gelangt die Welt in den Roboter, oder anders: Wie orientieren sich autonome Fahrzeuge in ihrer Umgebung? Diese Frage treibt ein Team der Medienwissenschaft der Ruhr-Universität Bochum um, und zwar weniger technisch als vielmehr darauf bezogen, welche Entscheidungen getroffen werden müssen, damit aus den Daten, die das System generiert, ein Modell der Welt entsteht, mit dem das Fahrzeug interagieren kann. Diese Entscheidungen wurden von Menschen getroffen. Um ihnen auf die Spur zu kommen, konstruierten die Forschenden ein selbstfahrendes Fahrzeug von Grund auf. Darüber berichtet Rubin, das Wissenschaftsmagazin der Ruhr-Universität Bochum.
Fehler offenbaren zugrunde liegende Entscheidungen
Augenfällig werden die fraglichen Entscheidungsprozesse vor allem da, wo Fehler passieren. „Es ist mit einem autonom fahrenden Auto zum Beispiel in den USA zu einem tödlichen Unfall gekommen, weil das Fahrzeug eine Frau mit einem Fahrrad nicht korrekt erkannt hatte“, berichtet Medienwissenschaftler Prof. Dr. Florian Sprenger. „Das System hätte eine Person allein vermutlich sicher erkennen können, ebenso ein Fahrrad. Aber in der Kombination war das Ganze nicht zu interpretieren.“
Doktorand Alex Schmiedel hat sich eingehend mit Normen zum Thema beschäftigt und unter anderem Hinweise zu Sicherheitstests der autonomen Orientierungstechnik ausgewertet. „Darin ist zum Beispiel festgehalten, dass Dummies in solchen Tests keine flatternde Kleidung tragen sollten, da solche Kleidungsstücke schlecht für die Systeme zu erkennen sind“, berichtet er. „Solche Entscheidungen haben einige Tragweite, wenn wir zum Beispiel daran denken, dass Clubgänger*innen in genau solcher Kleidung vielleicht nachts und bei für die Sensoren schlechten Sichtverhältnissen nach Hause gehen“, gibt er zu bedenken.
Um den Ketten dieser Entscheidungen auf die Spur zu kommen, zieht das Forschungsprojekt auch historische Dokumente aus der Entwicklungszeit autonom fahrender Systeme heran. Das Hauptaugenmerk liegt aber auf der eigenen Konstruktion eines solchen Systems – bewusst ohne das Vorwissen, das Ingenieur*innen mitbringen. „Das autonome Fahrzeug von Null an selbst zu konstruieren hat ungefähr ein Semester gedauert, drei Wochen davon sehr intensiv“, sagt Alex Schmiedel. Das Scheitern gehörte für die Forschenden zum Prozess dazu.





